Description¶
Simulating Collaborative Robots in Massive Multi-Agent Game Execution, or SCRIMMAGE, provides a flexible simulation environment for the experimentation and testing of novel mobile robotics algorithms. The development of SCRIMMAGE was inspired by the Stage robotics simulator (http://playerstage.sourceforge.net/doc/stage-svn/). Specifically, Stage’s ability to efficiently simulate multiple robots and its plugin interface for robotic control, motion models, sensors, and autonomy communication are desirable. However, Stage is inherently a two-dimensional simulator, which limits its usefulness for aerial robotic platforms. SCRIMMAGE provides a three-dimensional robotics environment that can simulate varying levels of sensor and motion model fidelity due to its flexible plugin interface. This allows a robotics researcher to simulate hundreds of aircraft with low-fidelity motion models or tens of aircraft with high-fidelity motion models on a standard consumer laptop. If greater performance is desired, SCRIMMAGE was designed with parallelization in mind, such that it can execute on a cluster.
An overview of the types of SCRIMMAGE plugins and how data flows through the SCRIMMAGE simulation is shown in Fig. 1.
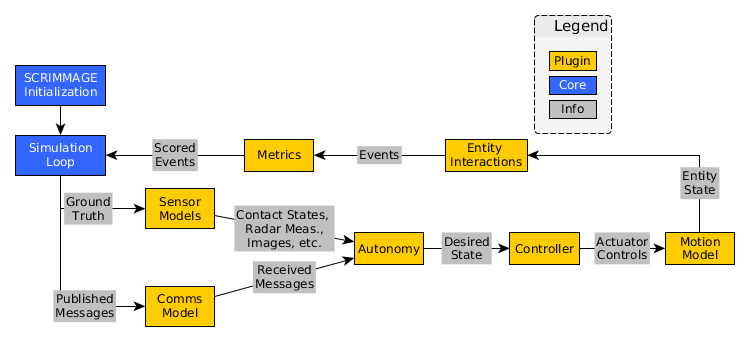
Fig. 1 SCRIMMAGE’s plugin interface.¶
A SCRIMMAGE developer creates and uses existing plugins to assemble agents, also known as entities, in a SCRIMMAGE mission or scenario. An entity consists of an assemblage of sensor, communication, autonomy, controller, and motion model plugins, as shown in Fig. 2.
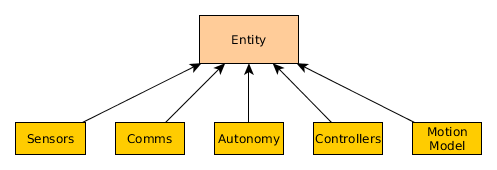
Fig. 2 A SCRIMMAGE entity is composed of multiple plugins.¶
A robotics researcher uses SCRIMMAGE to develop, visualize, and test novel autonomy and control algorithms for both single-vehicle and swarm-based robotics. The researcher accomplishes this by first deciding on the robotic platform’s motion model and sensor suite. The researcher can use SCRIMMAGE’s XML configuration files to “build” a simulated robotic model based on the built-in motion models and sensors or the researcher can use the C++ plugin interface to design their own motion models and sensors.
In addition to the motion model and sensor plugin interface, SCRIMMAGE also has an Autonomy plugin interface. Through this interface, the robotics researcher can write C++ code that queries SCRIMMAGE’s World Model and sensor models and then provide a desired future state for the robot being controlled. It is in this C++ code that the robotics researcher develops the higher-level autonomy algorithms. The Autonomy C++ code has an associated XML parameter file that allows the user to modify arbitrary values in the Autonomy C++ code. SCRIMMAGE provides scripts to enable the user to run simulations iteratively while varying the input parameters based on a desired range of values and the outcome of the simulation. This allows the researcher to implement reinforcement learning algorithms with SCRIMMAGE. Thus far, researchers have implemented greedy-based algorithms, classical swarming algorithms, and biologically inspired algorithms through this Autonomy plugin interface. The Autonomy interface can also be used with autonomous systems that make use of common communication architectures, such as the Robot Operating System (ROS), the Mission Oriented Operating Suite (MOOS), and Data Distribution Server (DDS). It is through the Autonomy plugin interface that the real autonomy research takes place.
After building the models and autonomy control logic for the robotic platforms, the researcher uses SCRIMMAGE’s XML configuration files to design the World Model and initial conditions for all robotic platforms. SCRIMMAGE is especially designed to handle the initialization of swarms of homogeneous and heterogeneous robotic platforms, which can be tedious to define in XML if not handled correctly by the simulator. Since an XML file is used to define the mission, the SCRIMMAGE code does not have to be recompiled; thus, autonomy development time is decreased.
While executing, SCRIMMAGE is designed to run on either a standard consumer laptop or a cluster via parallelization. When running on a cluster, SCRIMMAGE uses the Google Protocol Buffer serialization standard to communicate with remote processes. The remote processes are typically the high-level autonomy logic and high-fidelity motion models. The user can visualize the simulation while it’s running or after the simulation is complete via SCRIMMAGE’s visualization GUI. The GUI was written with the open source Visualization Toolkit (VTK) (http://www.vtk.org/), but it is not required during simulation.